
Wersja oprogramowania(Typ licencji) |
Agriculture(Online) |
Pro(Online, Offline) |
Electricity(Online) |
Cluster(Online) |
|---|---|---|---|---|
|
Mapowanie 2D w czasie rzeczywistym |
|
|
|
|
|
Działania rolnicze |
|
|
|
|
|
Rekonstrukcja 2D (pola) |
|
|
|
|
|
Multispektralna rekonstrukcja 2D |
|
|
|
|
|
Rekonstrukcja 2D (budowle) |
|
|
|
|
|
Importowanie plików KML |
|
|
|
|
|
Wyjściowy układ współrzędnych |
|
|
|
|
|
Rekonstrukcja ROI |
|
|
|
|
|
Import danych POS |
|
|
|
|
|
Rekonstrukcja przy użyciu wielu procesorów graficznych |
|
|
|
|
|
Rekonstrukcja 3D |
|
|
|
|
|
Planowanie misji 3D |
|
|
|
|
|
Mapowanie 3D w czasie rzeczywistym |
|
|
|
|
|
Dane GCP |
|
|
|
|
|
Optymalizacja dokładności chmury punktów LiDAR |
|
|
|
|
|
Zastosowanie w energetyce |
|
|
|
|
|
Szczegółowe inspekcje |
|
|
|
|
Jak kupić? |
|
 |
|
|
Planowanie misji z wykorzystaniem Waypoints: zaplanuj trasę lotu i wykonaj zdjęcia lub filmy w wybranych punktach trasy wzdłuż jej przebiegu.
Misja mapowania: przechwytuj zdjęcia w celu zrekonstruowania modelu 2D.
Planowanie misji Oblique: pozyskuj zdjęcia obszaru wykonane pod wieloma kątami w celu zrekonstruowania modelu 3D.
Planowanie misji po korytarzu: Twórz zautomatyzowane misje lotnicze wokół dróg i linii kolejowych, po prostu rysując linię na mapie.
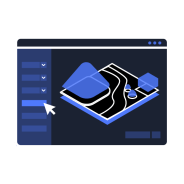
Szczegółowe planowanie misji inspekcyjnej: ustaw punkty docelowe na zrekonstruowanym modelu, a trasa lotu zostanie automatycznie wygenerowana, pozwalając dronowi na wykonanie zdjęć w tych punktach docelowych.
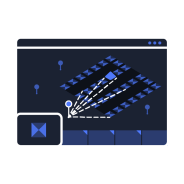
Misja Oblique wykorzystuje 5 tras lotu, aby uchwycić taką samą ilość danych, jak przy użyciu 5 kamer jednocześnie na dronie. 5 tras lotu odpowiada 5 kierunkom kamery – w dół, do przodu, do tyłu, w lewo i w prawo.
Jeśli masz dostęp do urządzenia mobilnego, które ma połączenie z Internetem (np. telefon komórkowy), możesz włączyć hotspot, aby połączyć laptopa z Internetem.
Jeśli w miejscu, w którym działasz, nie ma sygnału internetowego przelecieć dronem wokół obszaru, który ma zostać odwzorowany, aby wyznaczyć punkty graniczne w celu zaplanowania tras lotu.
W fotogrametrii wielkość piksela terenowego (GSD) na lotniczym zdjęciu cyfrowym (takim jak ortofoto) terenu jest to rzeczywista odległość na ziemi uchwycona jako wartość reprezentowana przez piksele. Za jednostkę przyjmuje się cm/piksel.
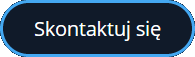
Wysokość względna misji w ustawieniach zaawansowanych to wysokość punktu startu względem mapowanego obszaru.
Mission Altitude to wysokość drona w stosunku do mapowanego obszaru, która jest również sposobem obliczania wielkości piksela terenowego (GSD).
Zaleca się, aby wskaźnik pokrycia z przodu wynosił 80%, a wskaźnik pokrycia z boku 70%, co powinno spełnić wymagania dla większości scenariuszy zastosowań. Wskaźnik pokrycia można zwiększyć, gdy mapowany obszar ma dużą różnicę wysokości, aby zapewnić wystarczające pokrycie najwyższego mapowanego punktu. Gdy mapowany obszar jest stosunkowo jednolity pod względem wysokości, współczynnik pokrycia można ustawić niżej, aby zmniejszyć ilość danych, które muszą zostać przetworzone, dzięki czemu misja mapowania będzie bardziej wydajna. Zaleca się jednak, aby pokrycie przednie wynosiło minimum 65%, a boczne minimum 60%.
Być może pracujesz w miejscu, w którym występuje wiele zakłóceń sygnału lub przeszkód, co wpływa na siłę sygnału RTK. Spróbuj wyłączyć moduł RTK i wystartować ręcznie z pozycjonowaniem GNSS. Gdy dron osiągnie wysokość, na której jest mniej zakłóceń, możesz włączyć moduł RTK i połączyć się z DJI Terra, aby przeprowadzić swoje misje lotnicze.
Phantom 4 RTK (aparatura), Phantom 4 Pro V2.0, Phantom 4 Pro + V2.0.
Uwaga: bez sygnału RTK modele mogą być słabej jakości lub niemożliwe do uzyskania.
Nie, chmura punktów LiDAR jest funkcją darmową, ale jeśli chcesz korzystać z funkcji optymalizacji dokładności chmury punktów, musisz zakupić licencję professional lub wyższą.
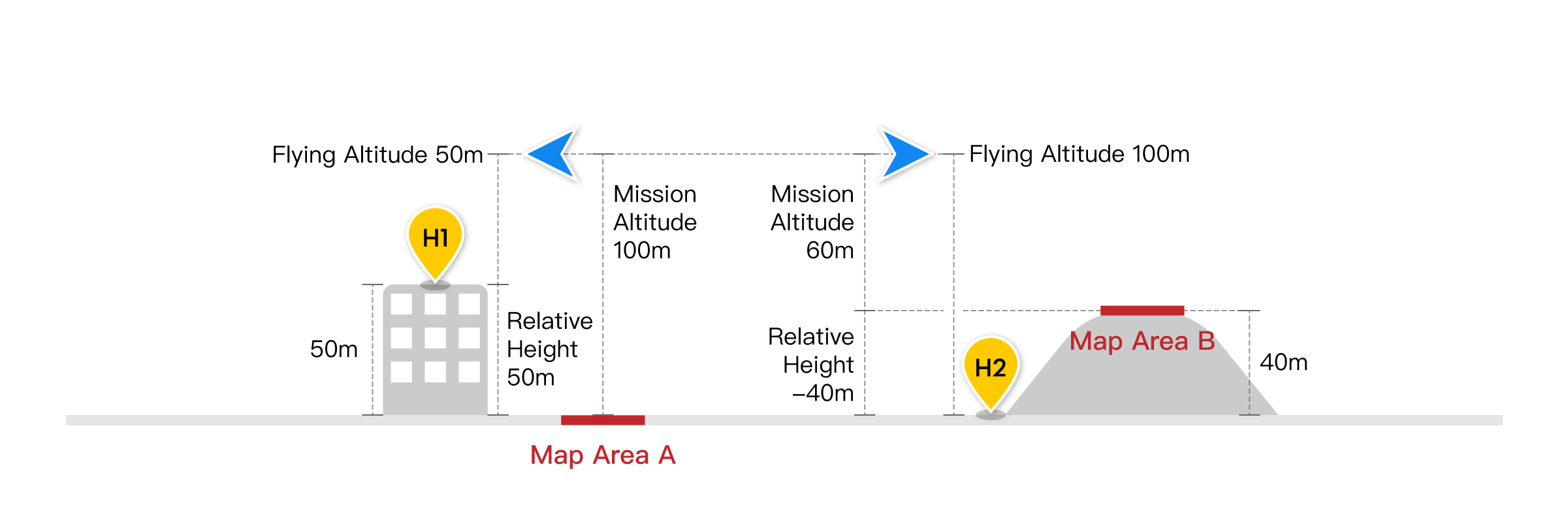
Importowane foldery muszą zawierać dane chmury punktów LiDAR, dane RTK, dane IMU, natomiast dane JPEG mogą być importowane w razie potrzeby (wybierz folder nazwany zgodnie z czasem gromadzenia informacji)
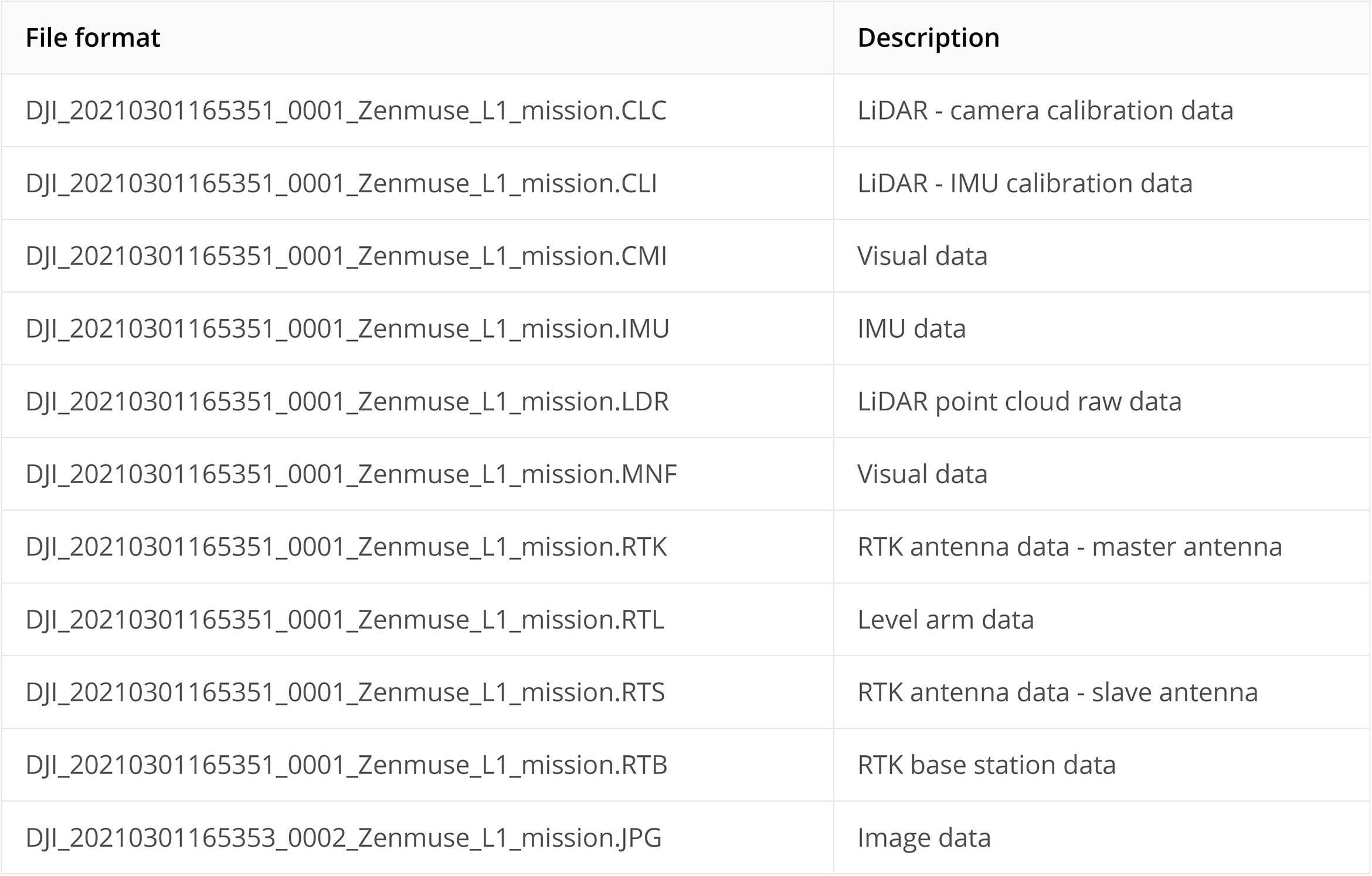
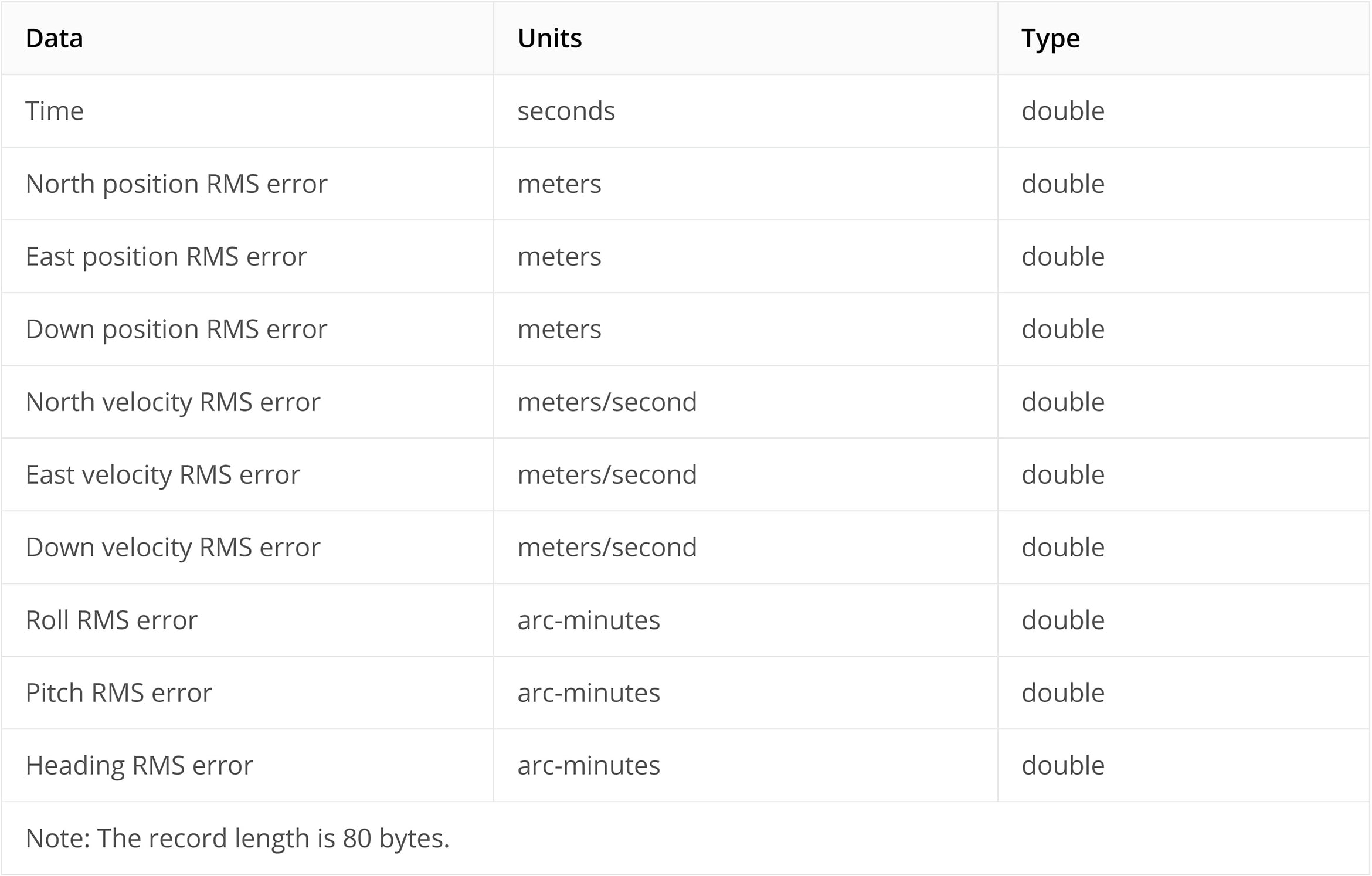
 Format SMRMSG
Format SMRMSG
Domyślnym układem współrzędnych jest WGS84 i może być modyfikowany.
Zaleca się rozdzielenie go na wiele zadań do przetworzenia.
Współczynnik odbicia światła mieści się w przedziale 0 – 255, gdzie 0 do 150 odpowiada współczynnikowi odbicia w zakresie 0 do 100% w modelu odbicia Lamberta; 151 do 255 odpowiada współczynnikowi odbicia obiektów docelowych o właściwościach retrofleksyjnych.
Współrzędne 3D, kolor RGB, współczynnik odbicia światła, znacznik czasowy GPS, liczba powrotów sygnału, rzeczywisty numer powrotu i kąt skanowania punktów są rejestrowane wraz z całkowitą liczbą punktów odpowiadających każdemu powrotowi, oprogramowaniem i wersją odpowiadającą wygenerowanym wynikom oraz układem współrzędnych geograficznych.
.pnts, .las, .s3mb, .ply, oraz .pcd
Aktualnie nie obsługuje.
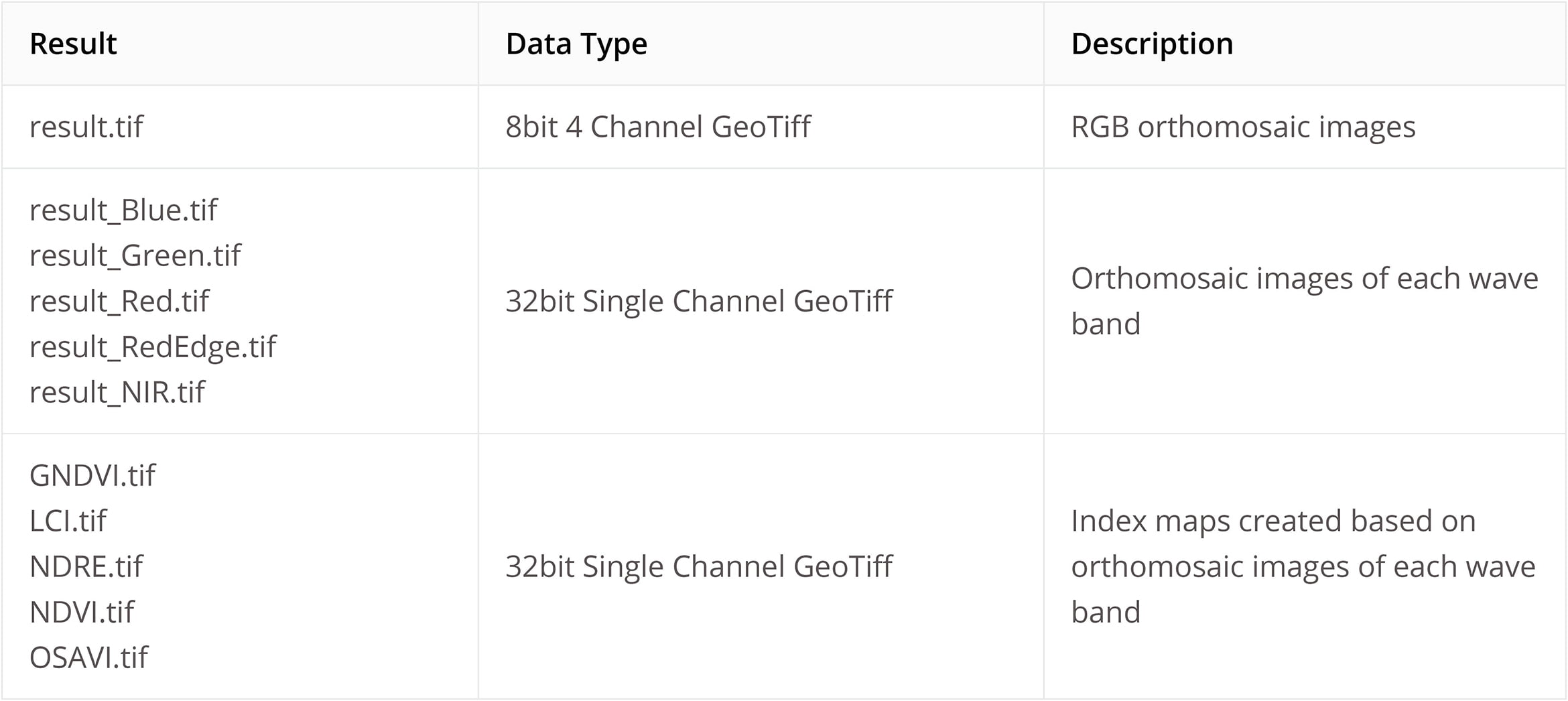
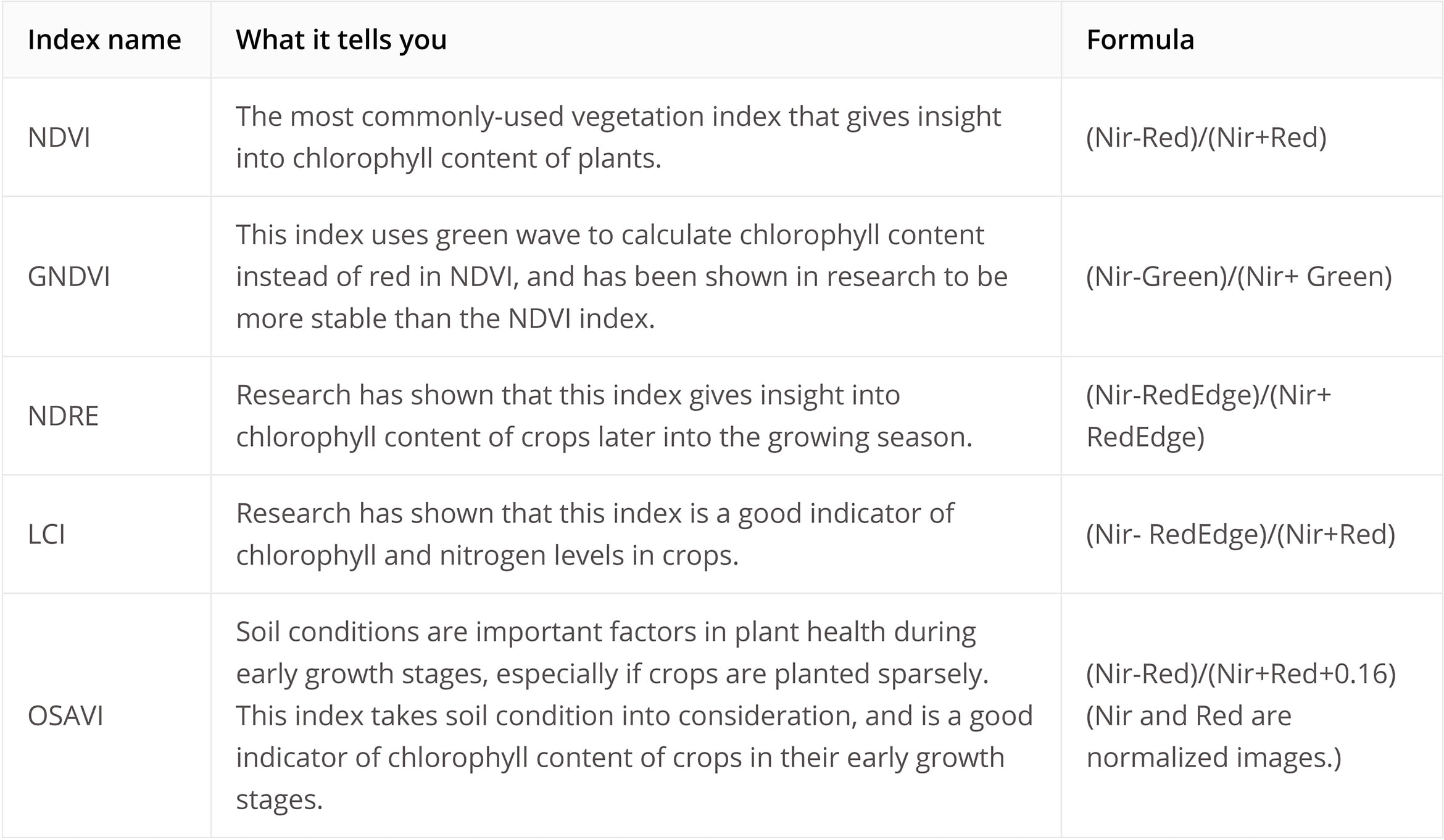
Nie. Obecnie do rekonstrukcji multispektralnych 2D wymagane są obrazy RGB.
Tak. Do wykonania rekonstrukcji wystarczy zaimportować obrazy RGB i obrazy w zakresach wymaganych przez dany indeks wegetacyjny.
Tak, przed rekonstrukcją można zaimportować dane kalibracyjne do korekcji radiometrycznej.
Obsługiwane są maksymalnie trzy zestawy danych tablicy kalibracyjnej.
Tak. Domyślna ścieżka to C:\Nazwa użytkownika\Dokumenty\DJI Terra. Ścieżkę można zmodyfikować, przechodząc do  następnie
następnie  Cache directory.
Cache directory.
Tak, pliki .obj wygenerowane w programie DJI Terra mogą być importowane do programów Maya, Blender, SketchUp i 3ds Max. Poszukaj tutoriali dotyczących konkretnego procesu dla każdego oprogramowania.
Tak, pliki .b3dm, .osgb, .ply i .obj generowane przez DJI Terra są uniwersalnymi formatami plików i mogą być osadzane na stronach internetowych. Instrukcje dotyczące osadzania każdego z tych formatów można znaleźć w Internecie.
Teoretycznie mogą być używane do rekonstrukcji modeli 3D, choć może na tym ucierpieć ich jakość. Nie mogą być używane do tworzenia rekonstrukcji 2D.
Teoretycznie tak dla modeli 3D, ale wyniki mogą nie być tak dobre jak w przypadku użycia dronów DJI. Na jakość rekonstrukcji wpłyną dane pozycjonowania GPS lub RTK na obrazach. Rekonstrukcje 2D w czasie rzeczywistym nie są obsługiwane.
W logu pojawią się następujące dane:
[GetAvailableFunc] iDate: 1596520841 iCurDate: 1596520513 iEndDate:1596729600
[GetAvailableFunc] Local license out of date.
iDate jest czasem serwera, a iCurDate jest bieżącym czasem komputera użytkownika. Licencja nie może być używana, gdy iDate > iCurDate.
Zazwyczaj wartość iCurDate powinna być większa niż iDate. Możliwe, że zegar komputera jest spowolniony. Możesz spróbować zresetować czas. Zarówno Win7 jak i Win10 obsługują automatyczną kalibrację czasu online. Sugerujemy włączenie tej funkcji.