
Ładunek użytkowy Zenmuse L2 łączy w sobie technologię LiDAR, autorski system IMU o wysokiej dokładności oraz kamerę mapującą 4/3 CMOS RGB, zapewniając jeszcze bardziej precyzyjne, wydajne i niezawodne pozyskiwanie danych geoprzestrzennych. W połączeniu z oprogramowaniem DJI Terra, stanowi gotowe rozwiązanie do gromadzenia i przetwarzania danych 3D o wysokiej dokładności.
Mniejsza plamka lasera,
zwiększona gęstość chmury punktów

Dzięki połączeniu GNSS i autorskiego modułu IMU, pomiary osiągają dokładność 4 cm w pionie i 5 cm w poziomie. [1]
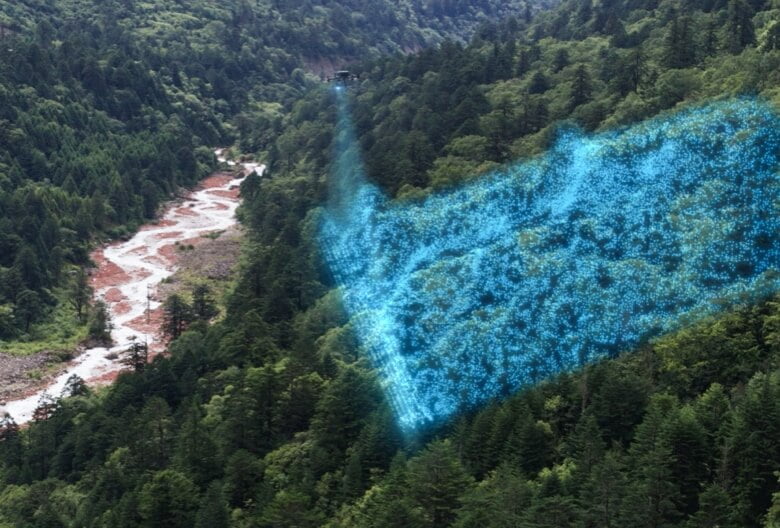
Gotowość do pracy natychmiast po włączeniu. Zbieranie danych geoprzestrzennych i RGB z obszaru o powierzchni 2,5 km2 podczas jednego lotu. [2]
W połączeniu z Matrice 350 RTK i DJI Terra, L2 oferuje gotowe i łatwe w użyciu rozwiązanie.
Dzięki połączeniu GNSS i autorskiego modułu IMU, pomiary osiągają dokładność 4 cm w pionie i 5 cm w poziomie. [1]
Gotowość do pracy natychmiast po włączeniu. Zbieranie danych geoprzestrzennych i RGB z obszaru o powierzchni 2,5 km2 podczas jednego lotu. [2]
W połączeniu z Matrice 350 RTK i DJI Terra, L2 oferuje gotowe i łatwe w użyciu rozwiązanie.
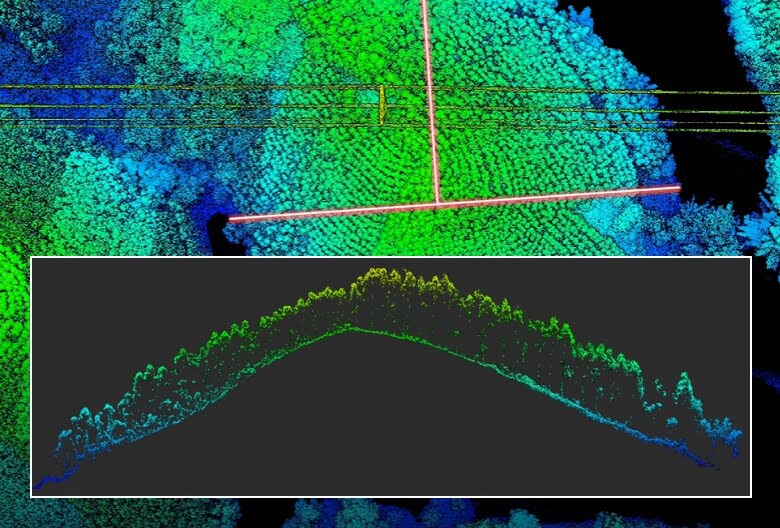
Dzięki zmniejszonemu rozmiarowi plamki 4×12 cm @100 m, czyli tylko jedna piąta tego co w Zenmuse L1, Zenmuse L2 nie tylko wykrywa mniejsze obiekty z większą ilością szczegółów, ale może również przenikać przez bardziej gęstą roślinność, generując dokładniejsze cyfrowe modele wysokościowe (DEM).
W obszarach gęsto porośniętych roślinnością, Zenmuse L2 może uchwycić więcej punktów naziemnych znajdujących się pod liśćmi.
Skaner LiDAR Zenmuse L2 w połączeniu z trzyosiowym gimbalem zapewnia efektywną szybkość przetwarzania chmury punktów skomplikowanych w scenariuszach pomiarowych.
Wydajność systemu IMU została znacznie zwiększona i jest on gotowy do użycia od razu po włączeniu zasilana. Dron jest gotowy do rozpoczęcia zadań natychmiast po ustawieniu RTK w statusie FIX, zapewniając zoptymalizowane działanie w terenie.

Rozmiar piksela został zwiększony do 3,3 μm, a efektywna liczba pikseli sięga teraz 20 MP, co skutkuje znaczną poprawą ogólnego obrazowania, a także większymi szczegółami chmury punktów w rzeczywistych kolorach. Minimalny interwał zdjęciowy został skrócony do 0,7 sekundy. Gdy tworzenie chmury punktów nie jest wymagane, kamera RGB może nadal robić zdjęcia i nagrywać filmy lub zbierać obrazy do mapowania w świetle widzialnym.
Obsługuje tryby Waypoint, Area i Linear Route do obsługi zadań pomiarowych w różnych środowiskach.
DJI Pilot 2 obsługuje trzy tryby wyświetlania – RGB, chmurę punktów i wyświetlanie chmury punktów/RGB obok siebie, prezentując wyniki operacyjne w intuicyjny sposób. Aktywacja RNG (Dalmierz laserowy) umożliwia dostęp do informacji o odległości między modułem LiDAR a obiektem w centrum pola widzenia, zwiększając bezpieczeństwo lotu. Obsługuje również cztery tryby kolorowania chmury punktów w czasie rzeczywistym – odbicie, wysokość, odległość i RGB.
Po zakończeniu pomiaru model chmury punktów 3D [7] można wyświetlić bezpośrednio w albumie. Modele chmur punktów 3D z wielu lotów można również łączyć, umożliwiając podejmowanie decyzji na miejscu dotyczących oceny jakości operacyjnej.
Po zebraniu danych z chmury punktów aplikacja DJI Pilot 2 automatycznie wygeneruje raport jakości zadania [8], dzięki czemu operatorzy mogą sprawdzać wyniki operacyjne w czasie rzeczywistym i na miejscu, dzięki czemu praca w terenie jest bardziej dynamiczna a zarazem bezstresowa.
W złożonych środowiskach operacyjnych użytkownicy mogą skonfigurować stacje bazowe RTK przed operacją, aby uniknąć utraty danych RTK z powodu zakłóceń, rozłączenia transmisji wideo lub innych problemów. Po zakończeniu operacji zaimportuj oryginalne pliki do DJI Terra, aby użyć przetwarzania kinematycznego PPK (post-processing kinematic) do odtworzenia precyzyjnych modeli.
Osiągnij wydajne i niezawodne przetwarzanie końcowe podczas importowania danych chmury punktów do DJI Terra. Wygeneruj model chmury punktów 3D w standardowym formacie za pomocą jednego kliknięcia po obliczeniu trajektorii chmury punktów i optymalizacji dokładności. Po sklasyfikowaniu punktów naziemnych, przy użyciu Ground Point Type, można wygenerować DEM. Jakość chmury punktów można analizować za pomocą funkcji Accuracy Control and Check.
1. Zmierzono w następujących warunkach w środowisku laboratoryjnym DJI: Zenmuse L2 zamontowany na Matrice 350 RTK i włączony. Korzystanie z funkcji Area Route aplikacji DJI Pilot 2 do planowania trasy lotu (z włączoną funkcją Calibrate IMU). Korzystanie z liniowego (repetitive) skanowania z RTK w statusie FIX. Wysokość względna została ustawiona na 150 m, prędkość lotu na 15 m/s, nachylenie gimbala na -90°, a każdy prosty odcinek trasy lotu był krótszy niż 1500 m. Obszar zawierał obiekty o oczywistych cechach kątowych i wykorzystywał odsłonięte punkty kontrolne na twardym podłożu, które były zgodne z modelem odbicia rozproszonego. Do przetwarzania końcowego wykorzystano oprogramowanie DJI Terra z włączoną funkcją Optimize Point Cloud Accuracy. W tych samych warunkach, gdy funkcja Optimize Point Cloud Accuracy nie była włączona, dokładność pionowa wynosiła 4 cm, a dokładność pozioma 8 cm.
2. Pomiar dokonany za pomocą Zenmuse L2 zainstalowanego na Matrice 350 RTK z prędkością lotu 15 m/s, wysokością lotu 150 m, współczynnikiem nakładania się boków 20%, włączoną kalibracją IMU, wyłączoną optymalizacją wysokości i wyłączonym śledzeniem terenu.
3. Przedstawione dane są wartościami przykładowymi. Zmierzone przy użyciu płaskiego obiektu o rozmiarze większym niż średnica wiązki lasera, prostopadłym kącie padania i widoczności atmosferycznej 23 km. W warunkach słabego oświetlenia wiązki laserowe mogą osiągnąć optymalny zasięg wykrywania. Jeśli wiązka lasera trafi w więcej niż jeden obiekt, całkowita moc transmisji lasera zostanie podzielona, a osiągalny zasięg zostanie zmniejszony. Maksymalny zasięg wykrywania wynosi 500 m.
4. Po włączeniu zasilania, IMU nie wymaga inicjalizacji; jednak użytkownicy muszą poczekać, aż RTK drona przejdzie w status FIX, zanim będzie mógł latać i działać.
5. Obliczono przez porównanie z Zenmuse L1.
6. Zmierzone w następujących warunkach i środowisku laboratoryjnym DJI: Zenmuse L2 zainstalowany na Matrice 350 RTK i włączony. Korzystanie z DJI Pilot 2’s i funkcji Area Route do planowania trasy lotu (z włączoną funkcją Calibrate IMU). RTK w statusie FIX. Wysokość względna została ustawiona na 150 m, prędkość lotu na 15 m/s, nachylenie gimbala na -90°, a każdy prosty odcinek trasy lotu był krótszy niż 1500 m.
7. Modele 3D są przetwarzane za pomocą funkcji spare representation.
8. Obsługuje tylko generowanie raportów jakości punktów trasy, obszarów i zadań liniowych.
450m przy współczynniku odbicia 50% i 0 klx
250m przy współczynniku odbicia 10% i 100 klx
Dane przykładowe. Zmierzone przy użyciu płaskiego obiektu o rozmiarze większym niż średnica wiązki laserowej, prostopadłym kącie padania i widoczności atmosferycznej 23 km. W środowiskach o słabym natężeniu światła wiązki laserowe mogą osiągnąć optymalny zasięg wykrywania. Jeśli wiązka lasera trafi w więcej niż jeden obiekt, całkowita moc nadajnika lasera zostanie podzielona, a osiągalny zasięg zostanie zmniejszony. Maksymalny zasięg wykrywania wynosi 500 m.




Podane przez Ciebie powyższe dane kontaktowe przetwarzane są przez nas w celu udzielenia odpowiedzi na przesłaną wiadomość. Szczegółowa informacja na temat zakresu i sposobu przetwarzania danych osobowych zawarta jest w Polityce prywatności (kliknij tutaj)



Grupa INNPRO w skład której wchodzi DJI ARS Enterprise jest głównym dystrybutorem oraz jedynym rekomendowanym centrum serwisowym marki DJI w Polsce.
Produkty
Informacje
Nie przegap żadnej nowości ze świata DJI Enterprise
Wyrażam zgodę na przetwarzanie danych osobowych w zakresie wyżej podanego adresu e-mail przez INNPRO Robert Błędowski w celu otrzymania informacji handlowej, materiałów marketingowych w formie Newsletter za pomocą poczty elektronicznej. Dowiedz się więcej.
Żeby zapewnić najlepsze wrażenia, my oraz nasi partnerzy używamy technologii takich jak pliki cookies do przechowywania i/lub uzyskiwania informacji o urządzeniu. Wyrażenie zgody na te technologie pozwoli nam oraz naszym partnerom na przetwarzanie danych osobowych, takich jak zachowanie podczas przeglądania lub unikalny identyfikator ID w tej witrynie. Brak zgody lub jej wycofanie może niekorzystnie wpłynąć na niektóre funkcje.
Kliknij poniżej, aby wyrazić zgodę na powyższe lub dokonać szczegółowych wyborów. Twoje wybory zostaną zastosowane tylko do tej witryny. Możesz zmienić swoje ustawienia w dowolnym momencie, w tym wycofać swoją zgodę, korzystając z przełączników w polityce plików cookie lub klikając przycisk zarządzaj zgodą u dołu ekranu.